Kubernetes-Pod的实现原理以及设计模式
为什么我们会需要 Pod
Pod,是 Kubernetes 项目中最小的 API 对象。如果换一个更专业的说法,我们可以这样描述:Pod,是 Kubernetes 项目的原子调度单位。
容器的本质是进程,容器镜像就是这个系统里的“.exe”安装包,Kubernetes 就是操作系统!
而 Kubernetes 项目所做的,其实就是将“进程组”的概念映射到了容器技术中,并使其成为了这个云计算“操作系统”里的“一等公民”。
Kubernetes 项目之所以要这么做的原因,我在前面介绍 Kubernetes 和 Borg 的关系时曾经提到过:在 Borg 项目的开发和实践过程中,Google 公司的工程师们发现,他们部署的应用,往往都存在着类似于“进程和进程组”的关系。更具体地说,就是这些应用之间有着密切的协作关系,使得它们必须部署在同一台机器上。
而如果事先没有“组”的概念,像这样的运维关系就会非常难以处理。
容器间的紧密协作,我们可以称为“超亲密关系”。这些具有“超亲密关系”容器的典型特征包括但不限于:
- 互相之间会发生直接的文件交换
- 使用 localhost 或者 Socket 文件进行本地通信
- 会发生非常频繁的远程调用
- 需要共享某些 Linux Namespace(比如,一个容器要加入另一个容器的 Network Namespace)等等。
这也就意味着,并不是所有有“关系”的容器都属于同一个 Pod。比如,PHP 应用容器和 MySQL 虽然会发生访问关系,但并没有必要、也不应该部署在同一台机器上,它们更适合做成两个 Pod
Pod 的实现原理
首先,关于 Pod 最重要的一个事实是:它只是一个逻辑概念。
也就是说,Kubernetes 真正处理的,还是宿主机操作系统上 Linux 容器的 Namespace 和 Cgroups,而并不存在一个所谓的 Pod 的边界或者隔离环境。
Pod,其实是一组共享了某些资源的容器。Pod 里的所有容器,共享的是同一个 Network Namespace,并且可以声明共享同一个 Volume。
在 Kubernetes 项目里,Pod 的实现需要使用一个中间容器,这个容器叫作 Infra 容器。在这个 Pod 中,Infra 容器永远都是第一个被创建的容器,而其他用户定义的容器,则通过 Join Network Namespace 的方式,与 Infra 容器关联在一起。这样的组织关系,可以用下面这样一个示意图来表达:
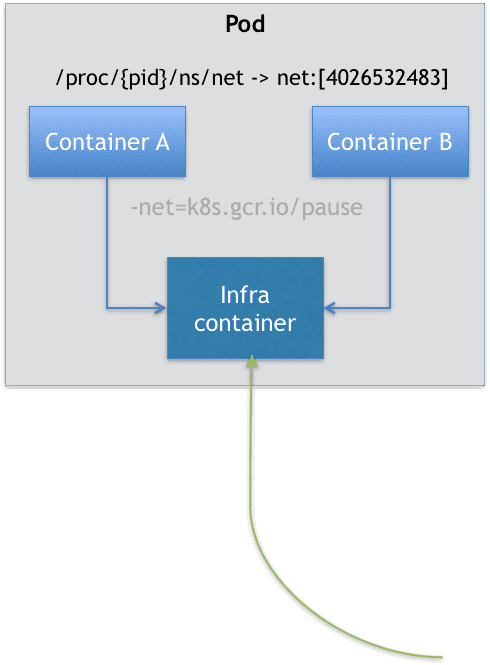
如上图所示,这个 Pod 里有两个用户容器 A 和 B,还有一个 Infra 容器。很容易理解,在 Kubernetes 项目里,Infra 容器一定要占用极少的资源,所以它使用的是一个非常特殊的镜像,叫作:k8s.gcr.io/pause。这个镜像是一个用汇编语言编写的、永远处于“暂停”状态的容器,解压后的大小也只有 100~200 KB 左右。
而在 Infra 容器“Hold 住”Network Namespace 后,用户容器就可以加入到 Infra 容器的 Network Namespace 当中了。所以,如果你查看这些容器在宿主机上的 Namespace 文件(这个 Namespace 文件的路径),它们指向的值一定是完全一样的。
这也就意味着,对于 Pod 里的容器 A 和容器 B 来说:
- 它们可以直接使用 localhost 进行通信;
- 它们看到的网络设备跟 Infra 容器看到的完全一样;
- 一个 Pod 只有一个 IP 地址,也就是这个 Pod 的 Network Namespace 对应的 IP 地址;
- 当然,其他的所有网络资源,都是一个 Pod 一份,并且被该 Pod 中的所有容器共享;
- Pod 的生命周期只跟 Infra 容器一致,而与容器 A 和 B 无关。
而对于同一个 Pod 里面的所有用户容器来说,它们的进出流量,也可以认为都是通过 Infra 容器完成的
容器设计模式
sidecar
sidecar 指的就是我们可以在一个 Pod 中,启动一个辅助容器,来完成一些独立于主进程(主容器)之外的工作
最典型的例子是:WAR 包与 Web 服务器
我们现在有一个 Java Web 应用的 WAR 包,它需要被放在 Tomcat 的 webapps 目录下运行起来。
假如,你现在只能用 Docker 来做这件事情,那该如何处理这个组合关系呢?
一种方法是,把 WAR 包直接放在 Tomcat 镜像的 webapps 目录下,做成一个新的镜像运行起来。可是,这时候,如果你要更新 WAR 包的内容,或者要升级 Tomcat 镜像,就要重新制作一个新的发布镜像,非常麻烦。
另一种方法是,你压根儿不管 WAR 包,永远只发布一个 Tomcat 容器。不过,这个容器的 webapps 目录,就必须声明一个 hostPath 类型的 Volume,从而把宿主机上的 WAR 包挂载进 Tomcat 容器当中运行起来。不过,这样你就必须要解决一个问题,即:如何让每一台宿主机,都预先准备好这个存储有 WAR 包的目录呢?这样来看,你只能独立维护一套分布式存储系统了。
实际上,有了 Pod 之后,这样的问题就很容易解决了。我们可以把 WAR 包和 Tomcat 分别做成镜像,然后把它们作为一个 Pod 里的两个容器“组合”在一起。这个 Pod 的配置文件如下所示:
1 | apiVersion: v1 |
在这个 Pod 中,我们定义了两个容器,第一个容器使用的镜像是 geektime/sample:v2,这个镜像里只有一个 WAR 包(sample.war)放在根目录下。而第二个容器则使用的是一个标准的 Tomcat 镜像。
不过,你可能已经注意到,WAR 包容器的类型不再是一个普通容器,而是一个 Init Container 类型的容器。
在 Pod 中,所有 Init Container 定义的容器,都会比 spec.containers 定义的用户容器先启动。并且,Init Container 容器会按顺序逐一启动,而直到它们都启动并且退出了,用户容器才会启动。
所以,这个 Init Container 类型的 WAR 包容器启动后,我执行了一句”cp /sample.war /app”,把应用的 WAR 包拷贝到 /app 目录下,然后退出。
而后这个 /app 目录,就挂载了一个名叫 app-volume 的 Volume。
接下来就很关键了。Tomcat 容器,同样声明了挂载 app-volume 到自己的 webapps 目录下。
所以,等 Tomcat 容器启动时,它的 webapps 目录下就一定会存在 sample.war 文件:这个文件正是 WAR 包容器启动时拷贝到这个 Volume 里面的,而这个 Volume 是被这两个容器共享的。
像这样,我们就用一种“组合”方式,解决了 WAR 包与 Tomcat 容器之间耦合关系的问题。
实际上,这个所谓的“组合”操作,正是容器设计模式里最常用的一种模式,它的名字叫:sidecar。
第二个例子,则是容器的日志收集。
比如,我现在有一个应用,需要不断地把日志文件输出到容器的 /var/log 目录中。
这时,我就可以把一个 Pod 里的 Volume 挂载到应用容器的 /var/log 目录上。
然后,在这个 Pod 里同时运行一个 sidecar 容器,它也声明挂载同一个 Volume 到自己的 /var/log 目录上。
这样,接下来 sidecar 容器就只需要做一件事儿,那就是不断地从自己的 /var/log 目录里读取日志文件,转发到 MongoDB 或者 Elasticsearch 中存储起来。这样,一个最基本的日志收集工作就完成了。
跟第一个例子一样,这个例子中的 sidecar 的主要工作也是使用共享的 Volume 来完成对文件的操作。
但不要忘记,Pod 的另一个重要特性是,它的所有容器都共享同一个 Network Namespace。这就使得很多与 Pod 网络相关的配置和管理,也都可以交给 sidecar 完成,而完全无须干涉用户容器。这里最典型的例子莫过于 Istio 这个微服务治理项目了。
Kubernetes-Pod的实现原理以及设计模式